前言
visionOS 2.0 比起 visionOS 1.0,完善了更多的基础控件。同时,针对图像的隐私问题,苹果提供了企业级 API,这些 API 可以利用 Apple Vision Pro 的传感器获取更多源数据,做到之前做不到的很多事情;主要分为两类
- 传感器相关:提供了相机原始
CVPixelBuffer、二维码扫描、透视录屏 - 平台控制:Apple Neural Engine 访问权限、3D 物体跟踪参数调整、性能控制
企业级API
If you’re interested in using the Enterprise APIs for visionOS entitlements in your app, the Account Holder of your Apple Developer Program or Apple Developer Enterprise Program can submit a Development Only request. When submitting a new request, you need to answer some questions about your app, and agree to the entitlement’s terms and conditions.
流程
- 账号要求:苹果官方文档提示 Apple Developer Program 或 Apple Developer Enterprise Program 都可以参与申请(之前媒体报道需要企业计划,后笔者找苹果确认,Apple Developer Program 也可以)
- 提交 Development Only 申请:https://developer.apple.com/go/?id=69613ca716fe11ef8ec848df370857f4
- 注意:需要 Apple Developer Program 的 Account Holder 或 Apple Developer Enterprise Program 来申请,不然会提示错误
- 使用企业级 API 完成开发
- 分发到 Apple Business Manager 或 Apple School Manager
可供申请的 entitlements 如下所示:
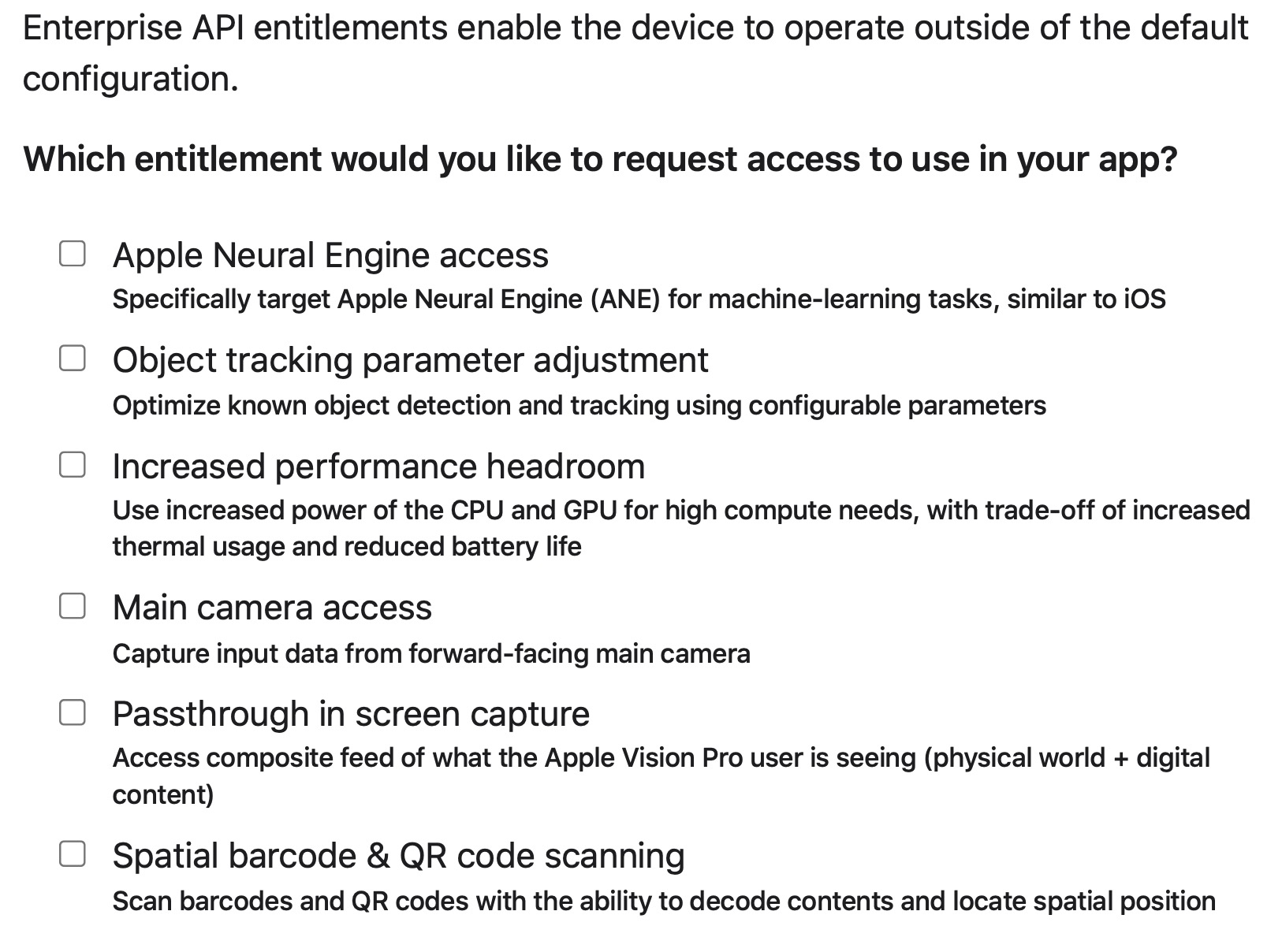
获取更多传感器数据
[重要]主相机数据
- 首先,我们需要申请相机权限
com.apple.developer.arkit.main-camera-access.allow(后文省略) -
利用企业级API,可以获取主相机 RGB 数据了,可以像 iOS 上一样利用这些数据
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29let formats = CameraVideoFormat.supportedVideoFormats(for: .main, cameraPositions:[.left]) let cameraFrameProvider = CameraFrameProvider() var arKitSession = ARKitSession() var pixelBuffer: CVPixelBuffer? // 1 权限检查 await arKitSession.queryAuthorization(for: [.cameraAccess]) // 2 使用 cameraFrameProvider 获取数据 do { try await arKitSession.run([cameraFrameProvider]) } catch { return } // 3 获取数据 guard let cameraFrameUpdates = cameraFrameProvider.cameraFrameUpdates(for: formats[0]) else { return } for await cameraFrame in cameraFrameUpdates { guard let mainCameraSample = cameraFrame.sample(for: .left) else { continue } // 4 获取到图像源数据 CVPixelBuffer self.pixelBuffer = mainCameraSample.pixelBuffer }
二维码扫描
com.apple.developer.arkit.barcode-detection.allow- 可以使用ARKit来检测、定位和解码
条形码和二维码,可能可以解锁一些工业或商业场景
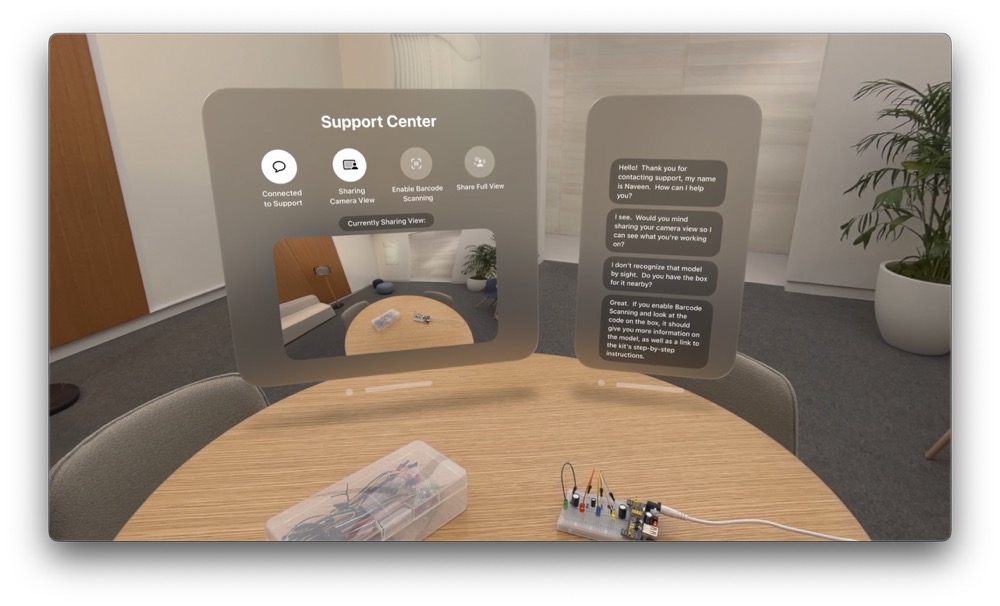
透视模式录屏
com.apple.developer.screen-capture.include-passthrough- 利用企业级API ,可以使用屏幕录制同时录制虚拟和现实了;之前无法获取真实世界画面;以下是demo中,讲录制的画面实时共享
平台控制
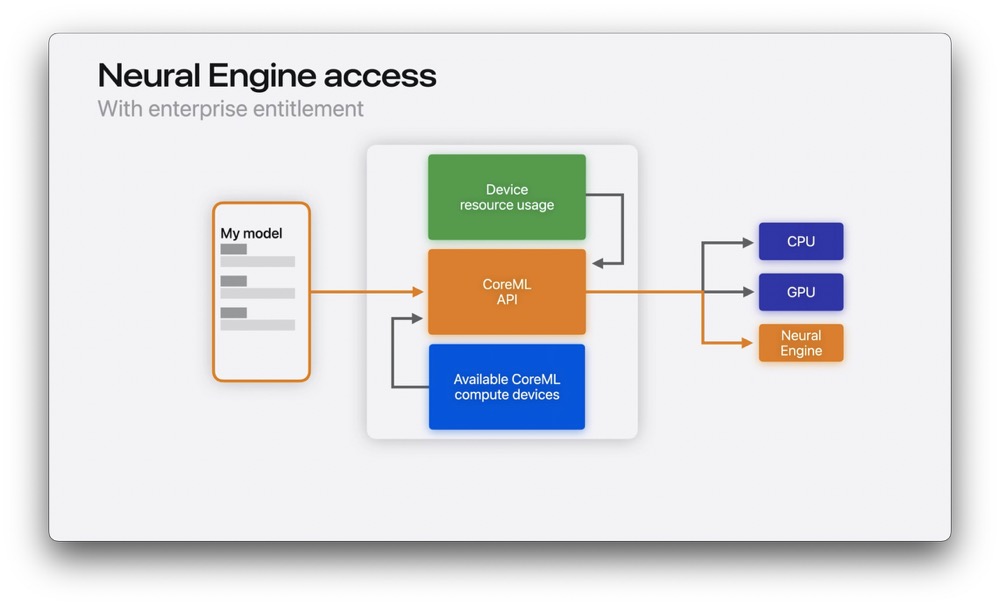
Apple Neural Engine
com.apple.developer.coreml.neural-engine-access-
现在可以访问 Apple Neural Engine ,然后用在自定义ML模型中,以下是调度的示例
1
2
3
4
5
6
7
8
9
10
11
12// Apple Neural Engine access example let availableComputeDevices = MLModel.availableComputeDevices for computeDevice in availableComputeDevices { switch computeDevice { case .cpu: setCpuEnabledForML(true) // Example method name case .gpu: setGpuEnabledForML(true) // Example method name case .neuralEngine: runMyMLModelWithNeuralEngineAvailable() // Example method name default: continue } } - 原先:不能直接访问 Apple Neural Engine
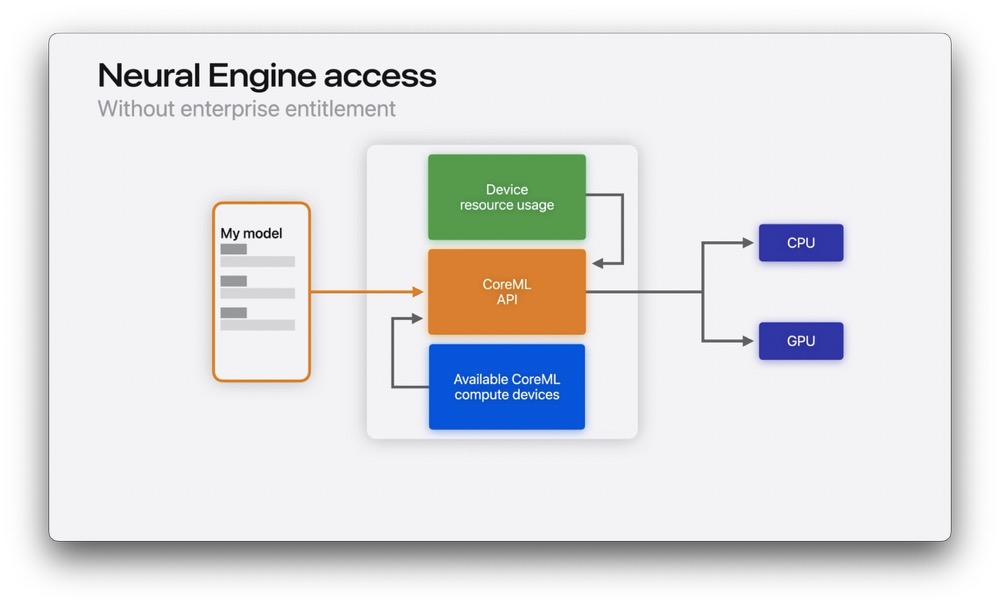
-
现在:可以利用 Apple Neural Engine 完成加速
https://raw.githubusercontent.com/DikeyKing/dikeyking.github.io/master/_posts/Apple%20Vision%20Pro%2036f831d7d5b942d68bc14bdb27e9811d/
物体跟踪参数设置
com.apple.developer.arkit.object-tracking-parameter-adjustment.allow- 现在可以通过参数设置来优化已知物体的检测和跟踪
-
增强的对象跟踪能力可以加快物体检测,以及调整应用性能
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25// Object tracking enhancements example var trackingParameters = ObjectTrackingProvider.TrackingConfiguration() // 将可跟踪的最大物体数量从10增加到15 trackingParameters.maximumTrackableInstances = 15 // 其他参数保留为默认值 trackingParameters.maximumInstancesPerReferenceObject = 1 // 检测速率 trackingParameters.detectionRate = 2.0 // 静止物体跟踪速率 trackingParameters.stationaryObjectTrackingRate = 5.0 // 移动物体跟踪速率 trackingParameters.movingObjectTrackingRate = 5.0 let objectTracking = ObjectTrackingProvider( referenceObjects: Array(referenceObjectDictionary.values), trackingConfiguration: trackingParameters) var arkitSession = ARKitSession() arkitSession.run([objectTracking])
Apple Vision 性能控制
com.apple.developer.app-compute-category- 可以使用 CPU 和 GPU 的官方超频模式(拉高功率)来提高Vision Pro 性能,来满足高计算需求
- 显然,缺点是会增加发热、加快电池消耗
-
比如:我们需要展示一辆赛车内部工作原理的时候,因为对算力要求高,这时候,我们就可以 Turbo 模式走起

3D 物体跟踪
3D 跟踪能力
在 VisionOS 2.0中,ARKit 带来更强大的物体跟踪功能。
-
首先:如图所示,ARKit 现在可以获取物体的
位置、朝向等信息,这些数据用坐标系和边界来表示
-
其次:ARKit 这次还给3D物体提供了标签功能

-
物体跟踪 + AR 效果,当然还有物体遮挡之类,ARKit 也帮我们做掉了。

-
要完成整个流程,过程分三步
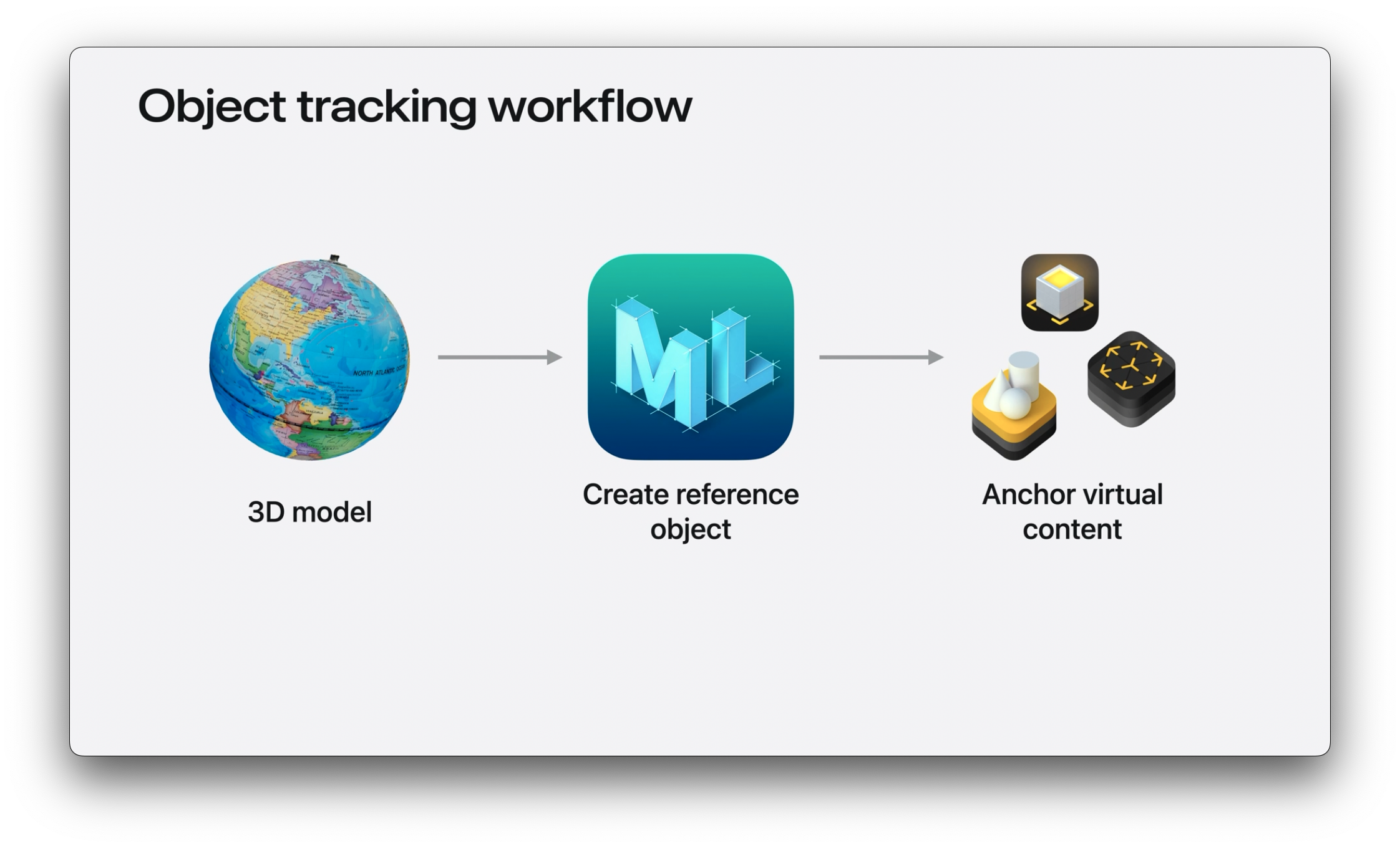
实现步骤一:制作 3D 模型
- USDZ 格式
- 画质需要尽量高
- 可以用 LiDAR iPhone 等等拍摄
- 对物体的要求:静止物体、具有可识别的纹理和刚体、非对称
具体这里不赘述,可以参考 https://developer.apple.com/augmented-reality/object-capture/
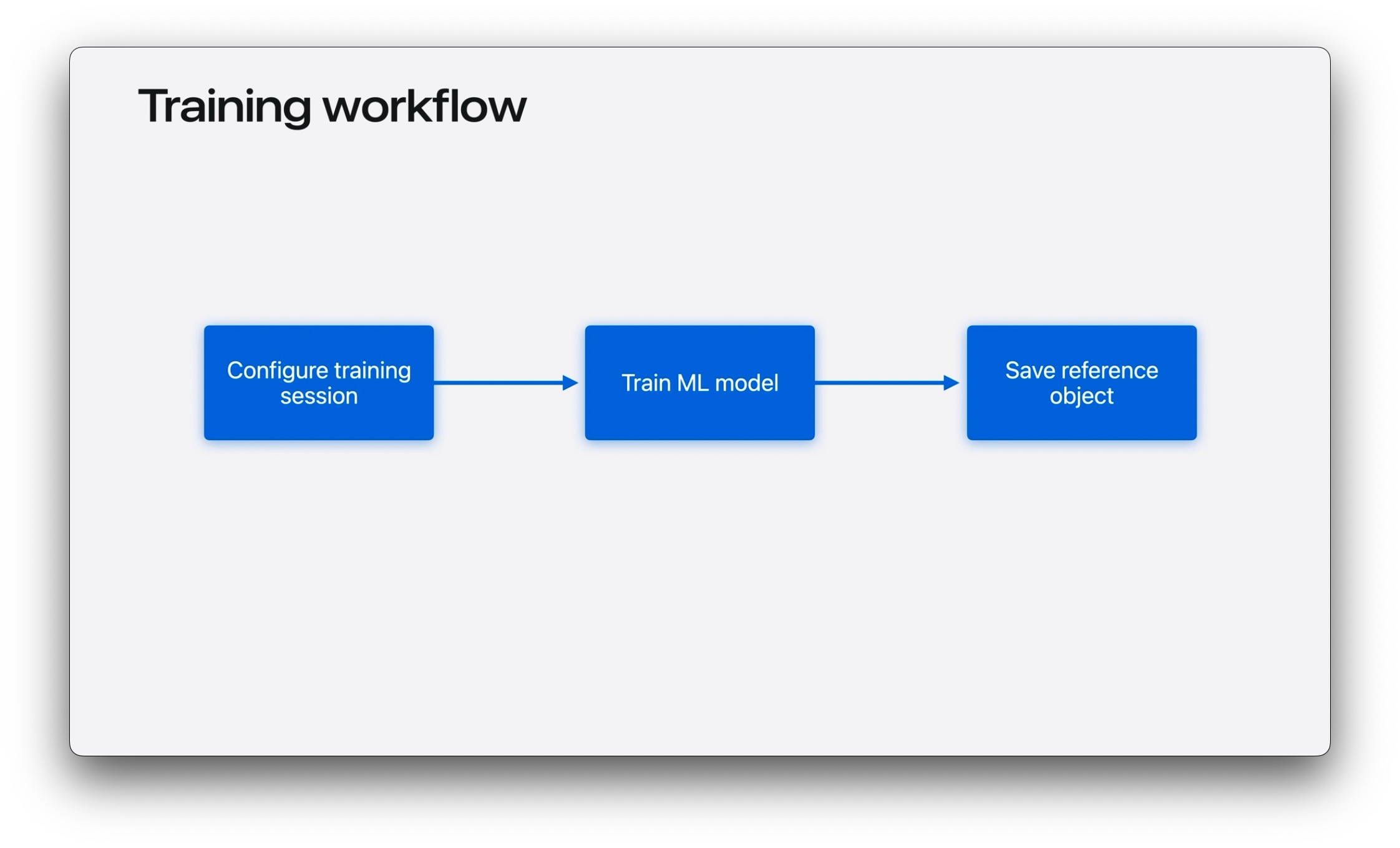
实现步骤二:使用 CoreML 完成训练
使用 CoreML 创建 ReferenceObject
-
新增Spatial栏目中找到:
Object Tracking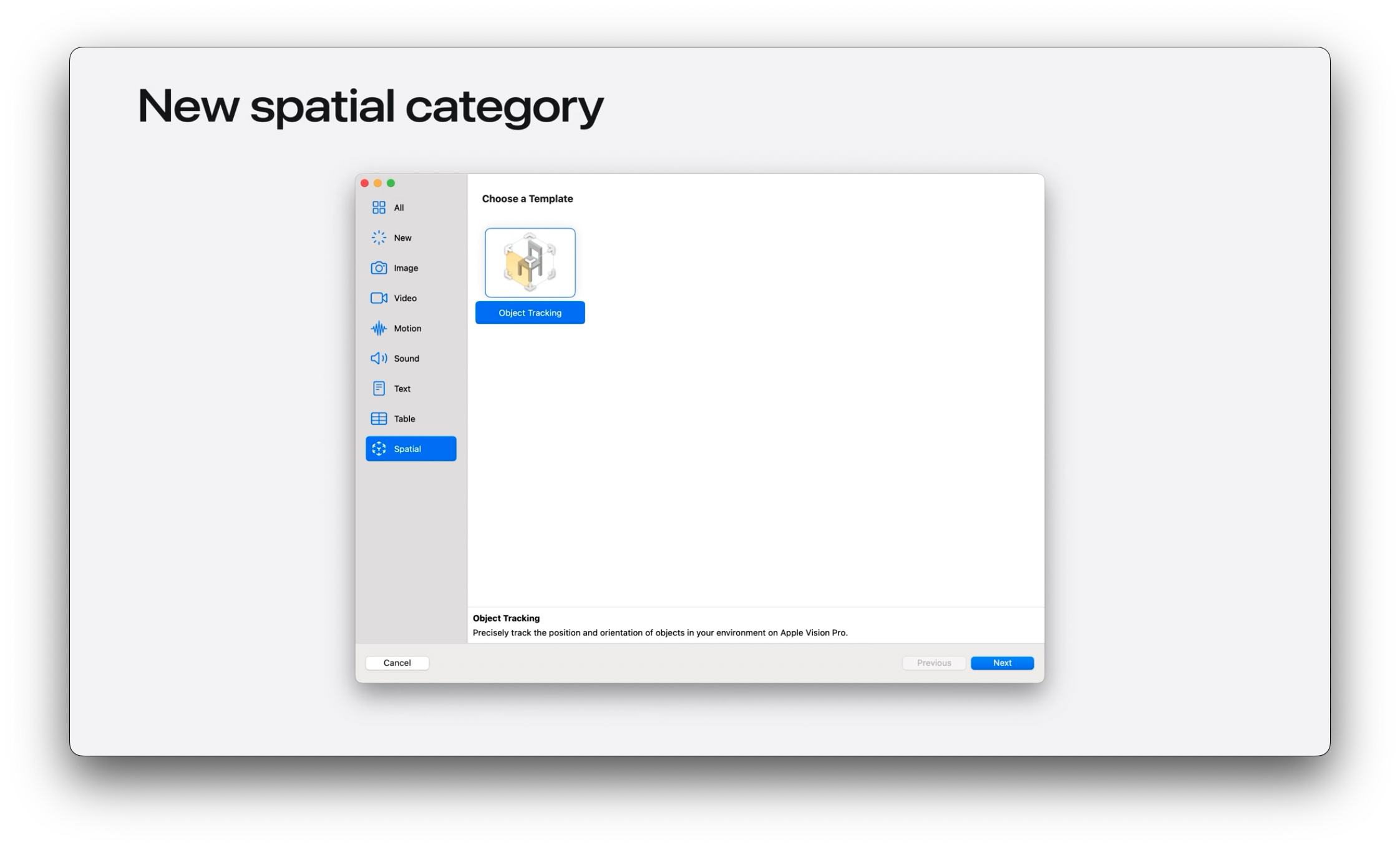
-
CoreML 过程
-
训练配置
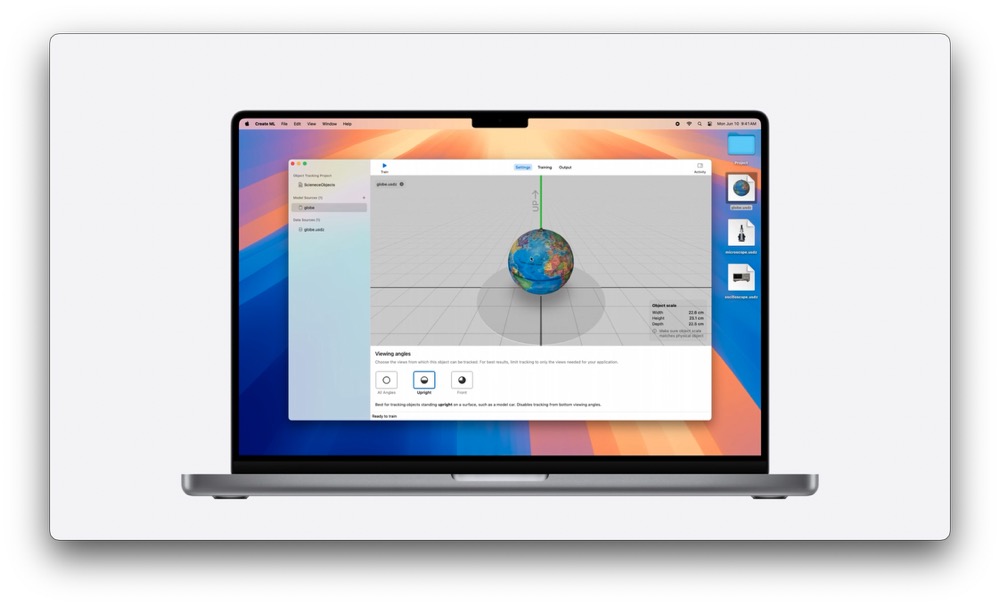
- 配置中,我们可以看到
All Angels、Upright、Front三个选项,设置这些参数,可以让CoreML更好地训练物体;显然,地球仪All Angels最合适,但是前文图中的显微镜,我们不太会翻转过来看,所以选Upright是合适的,然后图中的示波器,我们只看正面,那么Front是最合适和训练选项 - 多个物体:我们可以同时添加多个物体同时训练,比如,地球周围挂一个卫星
CoreML中还能显示物体在真实世界的尺寸,我们需要在训练前,调整好尺寸- 整个训练过程,可能需要几个小时,训练必须使用
Apple Silicon机器,Intel Mac Pro 用户流泪?
- 配置中,我们可以看到
实现步骤三:锚定虚拟物体
我们可以使用以下工具来锚定虚拟物体
-
Reality Composer Pro或RealityKit和ARKit:前者类似 Unity 中的可视化编辑器,后者则使用代码实现
- 使用
Reality Composer Pro-
可放置 USDZ 模型用于定位
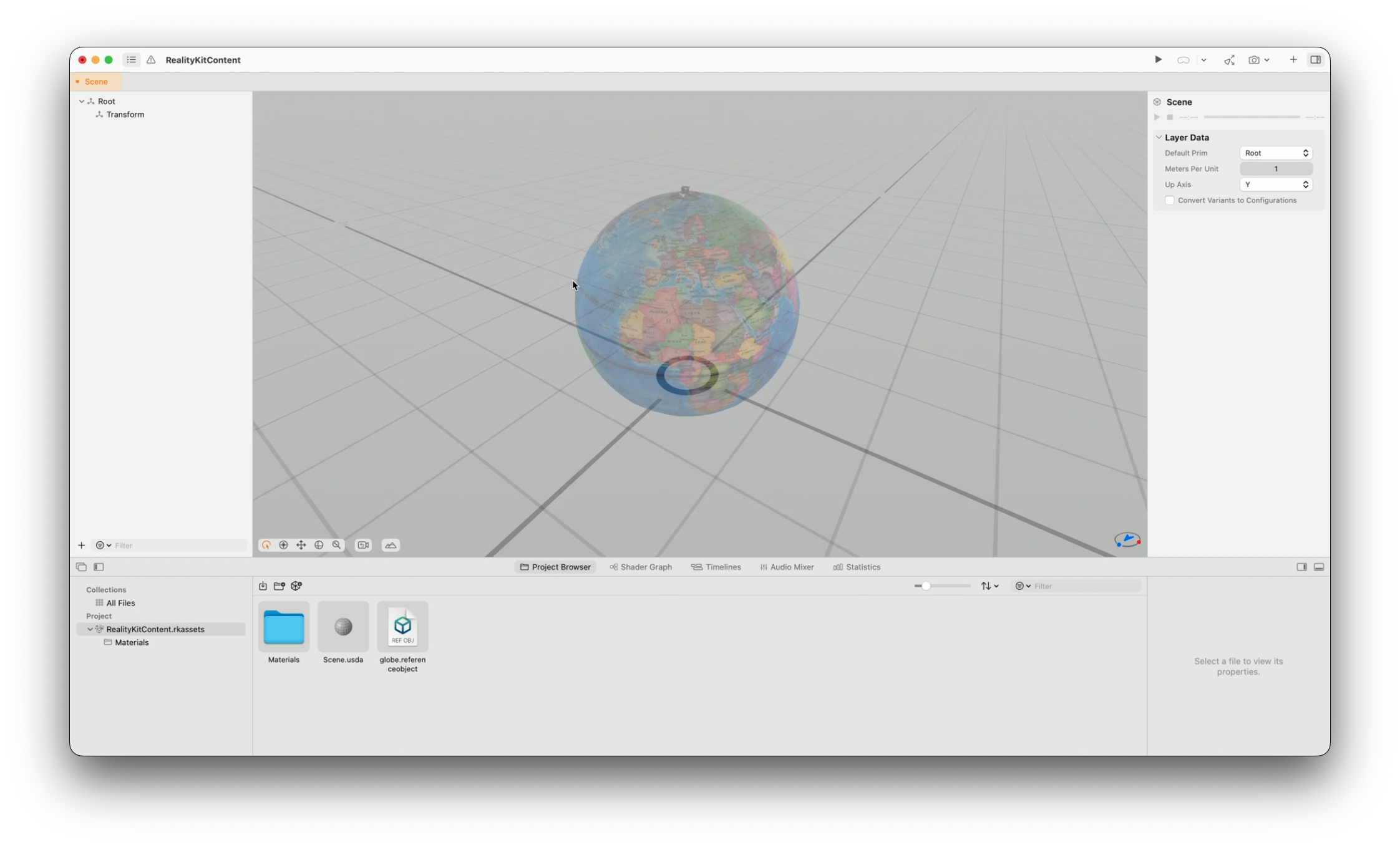
-
可以放置轨道,ARKit 和 RealityKit 会自动帮我们计算好遮挡之类的关系
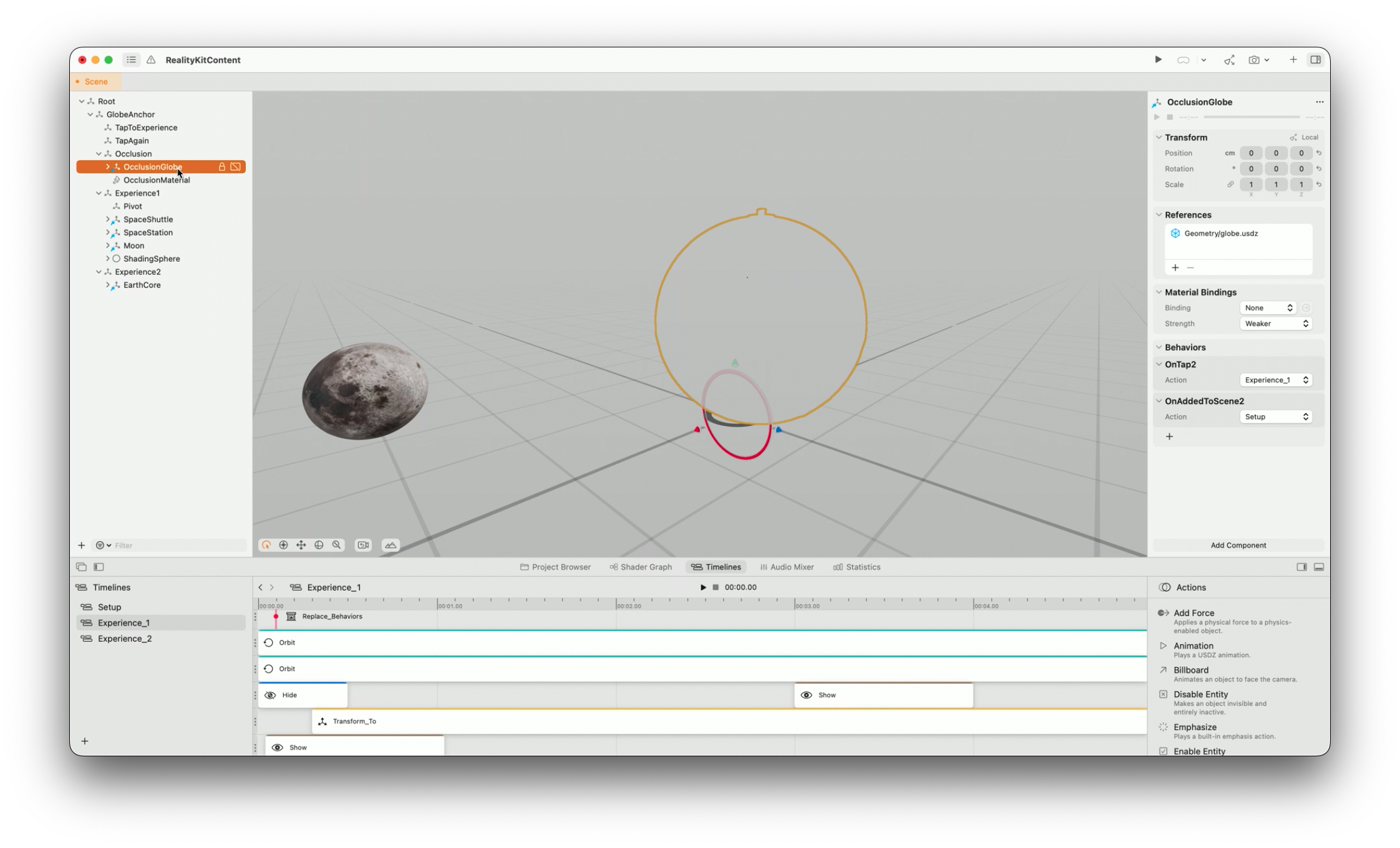
-
- 实现辅助页面
-
显示
USDZ1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21// 显示 USDZ 物体 struct ImmersiveView: View { @State var globeAnchor: Entity? = nil var body: some View { RealityView { content in // 使用 ARKit 加载 .referenceobject let refObjURL = Bundle.main.url(forResource: "globe", withExtension: ".referenceobject") let refObject = try? await ReferenceObject(from: refObjURL!) // 从 .referenceobject 中提取 USDZ 路径,加载 Entity 模型 let globePreviewEntity = try? await Entity.init(contentsOf: (refObject?.usdzFile)!) // 设置透明度 globePreviewEntity!.components.set(OpacityComponent(opacity: 0.5)) // 添加到场景 content.add(globePreviewEntity!) } } } -
检查锚点状态
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19// 检查锚点状态 struct ImmersiveView: View { @State var globeAnchor: Entity? = nil var body: some View { RealityView { content in if let scene = try? await Entity(named: "Immersive", in: realityKitContentBundle) { globeAnchor = scene.findEntity(named: "GlobeAnchor") content.add(scene) } let updateSub = content.subscribe(to: SceneEvents.Update.self) {event in if let anchor = globeAnchor, anchor.isAnchored { // 找到对象锚点,触发过渡动画 } else { // 未找到对象锚点,显示引导页面 } } } } } -
获取锚点
transform1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23// 转换空间 struct ImmersiveView: View { @State var globeAnchor: Entity? = nil var body: some View { RealityView { content in // 为对象和世界锚点设置锚点转换空间 let trackingSession = SpatialTrackingSession() // 空间跟踪配置,跟踪对象和世界 let config = SpatialTrackingSession.Configuration(tracking: [.object, .world]) // 如果成功运行会话,则检查结果中是否包含对象锚点 if let result = await trackingSession.run(config) { if result.anchor.contains(.object) { // 如果不包含对象锚点,说明未授权跟踪,提示未授权…… } } // 获取跟踪物体的世界坐标 let objectTransform = globeAnchor?.transformMatrix(relativeTo: nil) // 动画实现等等 } } }
-
小结
在 visionOS 1.0 版本中,图像数据、3D物体跟踪之类都做不到,现在 visionOS 2 都已经可以尝试。
伴随诸多新特性,visionOS 上应该有更多有价值的场景可以挖掘。
参考
- Introducing Enterprise APIs for visionOS
- Explore object tracking for visionOS
- Main Camera Access
- https://developer.apple.com/documentation/visionOS/building-spatial-experiences-for-business-apps-with-enterprise-apis
- https://developer.apple.com/documentation/arkit/cameraframe/sample/4443454-pixelbuffer
- https://news.nweon.com/121701